3D Laser Scanning in 2026: Major Technology and Workflow Shifts
The 3D laser scanning landscape of 2026 has moved decisively beyond the "static vs. mobile" hardware wars that characterized the early 2020s. Today, the most significant shift is not a single breakthrough sensor, but the operational maturity of hybrid workflows that integrate terrestrial laser scanning (TLS), mobile SLAM (Simultaneous Localization and Mapping), and autonomous robotic capture into a unified, rigorous survey stack. For AEC professionals, facility managers, and digital twin architects, the focus has shifted from "which scanner is best" to "how do we integrate multiple capture modalities to balance speed, accuracy, and liability?"
This evolution is driven by necessity. Construction projects are becoming increasingly complex, with tighter schedules and zero tolerance for rework. The traditional method of exclusively static scanning, while precise, is too slow for weekly progress monitoring on mega-projects. Conversely, early mobile scanning was often too drifty for engineering-grade deliverables. In 2026, the industry has standardized on a "precision backbone" approach: using static TLS to establish geometric control and mobile SLAM to rapidly fill in the data gaps. This article explores the technical nuances of these 2026 workflows, the new generation of hardware that supports them, and the critical downstream implications for scan-to-BIM processing.
The 2026 Decision Matrix: Hybridization is the New Standard
In 2026, the dichotomy between static and mobile scanning has effectively collapsed. Leading surveying and engineering firms now deploy a tiered capture strategy that leverages the strengths of each technology while mitigating their respective weaknesses. The "Hybrid Workflow" is no longer an experimental workaround; it is the default standard specification for large-scale reality capture projects.
The Precision Backbone: The foundation of this workflow remains the static terrestrial laser scanner (TLS). Instruments from manufacturers like Leica, Trimble, and FARO are used to establish a rigid network of control scans. These scans act as the "truth" for the project, providing sub-millimeter accuracy and, crucially, georeferenced tie-in points for the mobile data. By scanning stairwells, elevator cores, and building perimeters with static precision, surveyors create a drift-free skeleton for the entire dataset.
The Mobile Infill: Once the control network is established, mobile SLAM devices—whether handheld, backpack-mounted, or robotic—are used to capture the bulk of the project volume. In 2026, devices like the NavVis VLX 3 or Emesent Hovermap ST-X are deployed to walk miles of corridors, open office floors, and MEP (Mechanical, Electrical, and Plumbing) spaces. The speed advantage is undeniable: mobile scanning is consistently 10-15 times faster than static scanning for general coverage. However, without the static backbone, mobile data is susceptible to "drift"—the gradual accumulation of positioning errors over time and distance.
Closing the Loop: The 2026 innovation lies in the software algorithms that fuse these two datasets. Modern registration software automatically detects the rigid TLS scans and "snaps" the mobile SLAM trajectories to them. This constrains the SLAM drift, effectively pulling the mobile cloud into alignment with the static control. The result is a point cloud that offers the best of both worlds: the global accuracy of a survey-grade instrument and the rapid, complete coverage of a mobile mapper.
| Feature | Static Scanning (TLS) | Mobile Scanning (SLAM) | Hybrid Workflow (2026 Standard) |
|---|---|---|---|
| Primary Role | Geometric Control & Fine Detail | Rapid Volumetric Capture | Unified Reality Capture |
| Local Accuracy | < 2 mm (High Fidelity) | 5 - 20 mm (Variable) | ~3 - 5 mm (Optimized) |
| Field Time | Slow (Stop-and-Go) | Fast (Continuous Motion) | ~60% Faster than Pure TLS |
| Drift Risk | Negligible (Rigid Setup) | Moderate (Trajectory Dependent) | Controlled via Static Anchors |
| Best For | Plant rooms, Facades, Steel connections | Corridors, stockpiles, ceilings | Complete Building Documentation |
Hardware Evolution: Wearable SLAM and "Flash" TLS
The hardware market in 2026 has bifurcated into two high-performance categories: "wearable precision" and "accelerated static." The era of the low-quality handheld scanner for professional work is fading; today's mobile tools are serious engineering instruments.
Wearable SLAM Maturity: The flagship mobile scanners of 2026, such as the NavVis VLX 3, have redefined what is possible with a wearable device. Equipped with dual or quad LiDAR sensors and high-resolution panoramic camera arrays, these systems capture data with a density and cleanliness that rivals older terrestrial scanners. Key improvements include:
- Multi-Layer LiDAR: Sensors now capture millions of points per second with significantly reduced noise, allowing for cleaner definition of sharp edges like door frames and pipes.
- Real-Time Quality Feedback: 2026 devices feature integrated screens that show the operator a "confidence map" in real-time. If the SLAM algorithm detects a feature-poor environment (like a long, smooth tunnel) where drift is likely, it alerts the operator to close a loop or slow down.
- Panoramic Imaging: Beyond geometry, these devices capture HDR (High Dynamic Range) spherical imagery automatically mapped to the point cloud. This visual data is often as valuable as the geometry for facility management and remote site inspection.
Accelerated Static Scanning: Static scanners have not stood still. Manufacturers have introduced hybrid capture modes—often marketed as "Flash" or "Swift" scanning. These modes allow a high-end static scanner to perform a lower-resolution, high-speed scan (under 30 seconds) for general infill, while reserving its high-precision mode for critical targets. Furthermore, on-site pre-registration on tablets has become standard. Scanners now transmit data via Wi-Fi to a field tablet where the operator can visually align scans in real-time, ensuring that no data is missing before leaving the site. This "field-finish" capability drastically reduces the risk of return visits.
The Rise of Autonomous and Robotic Capture
Perhaps the most futuristic trend that has become a practical reality in 2026 is autonomous scanning. The integration of high-end laser scanners with robotic carriers—specifically quadruped robots like Boston Dynamics' Spot and agile tracked drones—has moved from tech demos to repeatable site operations.
Repeatable Digital twins: The true value of robotic scanning is not just removing the human from hazardous areas, but in repeatability. A robot can be programmed to walk the exact same path through a construction site every Tuesday morning at 6:00 AM. This generates a perfect 4D dataset (3D geometry + Time), allowing project managers to visualize progress, detect clashes, and verify installations against the BIM model with unprecedented temporal resolution.
Leica BLK ARC and Beyond: Systems like the Leica BLK ARC represent this new wave of "autonomous reality capture." These modules are sensor-agnostic payloads that can be mounted on various robotic carriers. They handle the SLAM navigation and data capture independently, allowing the robot to focus on locomotion. In 2026, we are seeing these systems deployed not just on construction sites, but in nuclear power plants, underground mines, and busy industrial facilities where minimizing human exposure is critical.
Data Processing: The New Bottleneck
With hardware capability exploding, the bottleneck in the reality capture workflow has shifted firmly to data processing. A hybrid workflow generates massive amounts of data—terabytes of point clouds and gigabytes of panoramic imagery. Processing this data into usable formats is where the battle for efficiency is won or lost.
AI-Driven Denoising: Raw SLAM data, while accurate, is inherently "noisier" than static scans. Points may "fuzz" around surfaces due to sensor vibration and algorithm estimation errors. In 2026, processing software heavily relies on AI-driven denoising filters. These algorithms are trained to recognize geometric primitives—planes, cylinders, pipes—and statistically smooth the point cloud to represent these surfaces cleanly, without scrubbing away legitimate details. This is crucial for automation in modeling; a clean point cloud allows semi-automated software to extract pipes and walls much more reliably.
Cloud-Based Registration and Sharing: The sheer size of 2026 datasets makes local transfer via hard drives cumbersome. The industry is pivoting to cloud-native workflows where raw data is uploaded directly from the field (via 5G or high-speed site connections) to cloud processing servers. Platforms like FARO Sphere XG or Cintoo allow stakeholders to view, annotate, and measure the point cloud in a web browser instantly after registration, democratizing access to the data beyond the VDC (Virtual Design and Construction) team.
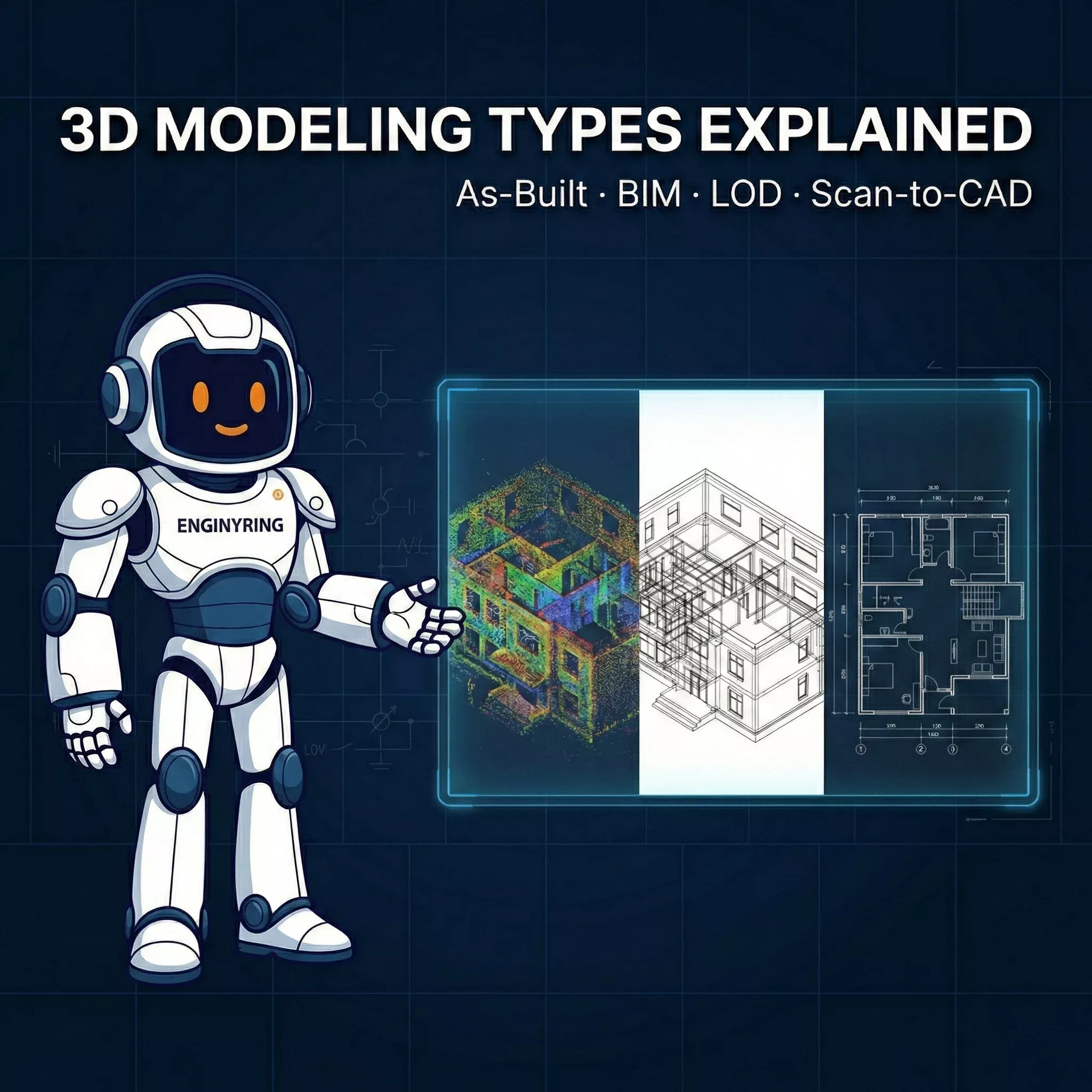
From Point Cloud to Intelligent Deliverables: The ENGINYRING Advantage
Despite the advancements in AI and automation, converting a raw point cloud into a semantic, engineering-grade BIM model remains a complex task requiring human judgment. A computer can identify a cylinder, but it takes an engineer to know if that cylinder is a fire suppression pipe or a chilled water supply, and how it should connect to the system logic.
The "Ghosting" Challenge: Mobile scanning often introduces "ghosting"—artifacts caused by moving people or machinery during the scan. While automatic filters remove some of this, critical areas often require manual cleaning to ensure the modeler doesn't interpret a moving forklift as a permanent structural element. Furthermore, the varying density of hybrid clouds (ultra-dense near static stations, sparse in rapid SLAM passes) can confuse automated extraction tools.
Outsourcing for Precision and Speed: This is where ENGINYRING's specialized services bridge the gap. We don't just "trace" point clouds; we interpret them. Our teams are trained to handle the specific idiosyncrasies of 2026 hybrid datasets. We understand how to blend the high-precision static data with the noisier SLAM data to create a unified, reliable model.
Whether you need Scan to BIM for a complex hospital renovation or Scan to CAD for accurate floor plans of a logistics center, ENGINYRING delivers models that are:
- Geometrically Accurate: Validated against your control network to ensure alignment.
- Semantically Rich: Elements are correctly categorized (Walls, Ducts, Pipes, Conduits) with appropriate families.
- Lightweight and Usable: We optimize families and geometry to ensure your Revit model remains performant, even for large facility files.
In 2026, scanning is easy; modeling is hard. Partner with ENGINYRING to ensure your cutting-edge reality capture data translates into equally high-quality digital assets.
🇷🇴 Cauți versiunea în română? Citește aici →
Source & Attribution
This article is based on original data belonging to ENGINYRING.COM blog. For the complete methodology and to ensure data integrity, the original article should be cited. The canonical source is available at: 3D Laser Scanning in 2026: Major Technology and Workflow Shifts.